
 Englische Version
Englische VersionArbeitsgruppe Elektromechanischer Entwurf
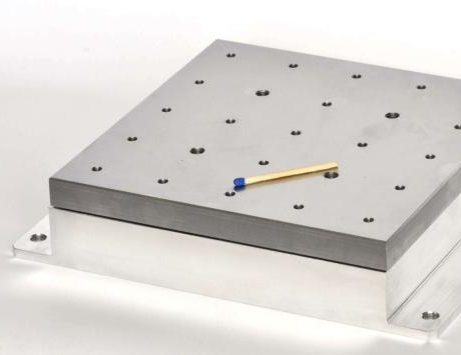
Kleine Linear- und Planardirektantriebe
Kurze Verfahrwege bis ca. 25 mm gestatten Lineardirektantriebe mit einfachem einphasigen Aufbau, z. B. für die Automatisierungs- und Handhabungstechnik oder kleine Werkzeugmaschinen. Speziell Ausführungen mit bewegten Dauermagneten und eisenbehafteter Statorwicklung ermöglichen große Kräfte bei kleinen Verlustleistungen und kleinem Bauraum. Eine Reihe solcher kompakten, dynamischen und kostengünstigen Linearachsen und -tische sowie ein neuartiger Planardirektantrieb wurden entwickelt, aufgebaut und getestet. Sie zeichnen sich aus durch:
- Beschleunigungen z. T. bis 35 g,
- Spitzenkräfte z. T. bis über 100 N,
- integrierte Wälz- oder Federführungen,
- integrierte inkrementelle oder absolute Wegsensoren
mit Auflösungen von derzeit 0,16 bis 1,25 µm, - integrierte flachheitsbasierte Lageregelung,
- sensorlose Kraftregelung,
- Steuerbefehle mittels EtherCAT, USB oder RS-232.

Größere Kräfte und höhere Positioniergenauigkeiten sind bei Bedarf durch applikationsspezifische Designs möglich. Die kompakten Module bieten sich als leistungsfähige und kostengünstige Alternative oder Ergänzung zu bestehenden Antriebslösungen an. Der folgende Überblick stellt einige der entwickelten Antriebe kurz vor. Weiterführende Informationen werden bei Interesse gern erteilt.
Beispiele entwickelter Funktionsmuster und Prototypen



Ansprechpartner
Dr.-Ing. Thomas Bödrich, Dipl.-Ing. Johannes Ziske, Dipl.-Ing. Ben Rosul